Stakeholder Workshop in Ravenna Showcases Advances in Trustworthy AI-Driven Underwater Robotics
NEWSLETTER >
The port of Ravenna recently hosted a stakeholder workshop bringing together project partners, researchers and end users to exchange insights on the latest developments in trustworthy AI-driven underwater robotics within the FAITH Project initiative.
The workshop focused on two of the project’s key technological pillars supporting robotics pilot activities:
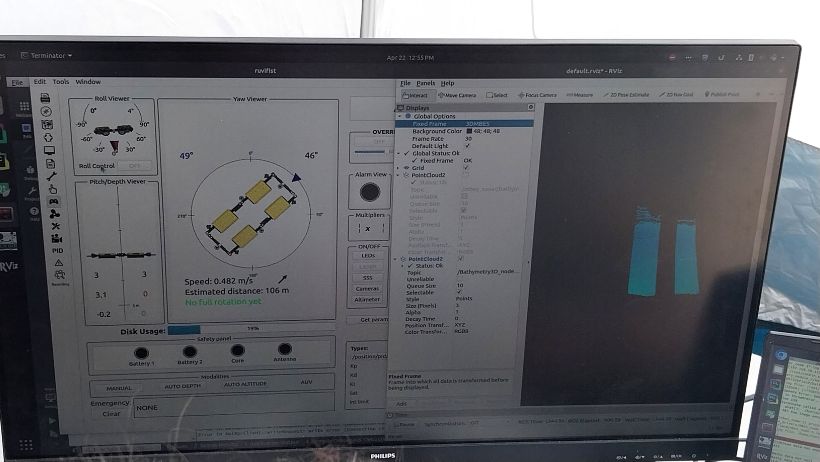
- Automatic Target Recognition (ATR) : enabling autonomous underwater vehicles to detect and geolocate submerged objects and anomalies with greater precision and reliability.
- Autonomous Coverage (AC) : supporting adaptive bathymetric surveying and enhancing inspection and monitoring capabilities for critical port infrastructure.
These technologies are designed to improve the efficiency, safety, and operational intelligence of underwater inspection missions while advancing the adoption of trustworthy AI solutions in maritime environments.



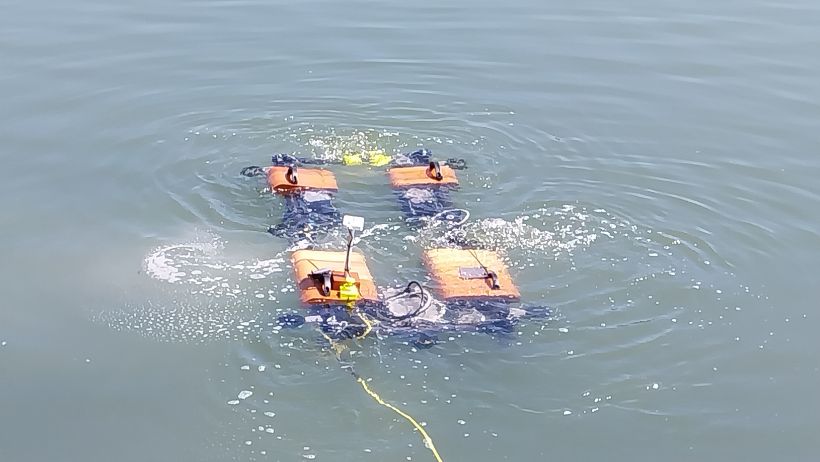




A key highlight of the event was the live demonstration of the prototype “Hyppo”, developed specifically for underwater inspection and data acquisition activities. Participants had the opportunity to observe the system in operation and discuss its practical applications, technological capabilities, and future development pathways.
The workshop also provided an important platform for collaboration between technical experts and end users, ensuring that ongoing research and innovation remain aligned with real operational needs in the maritime and port sectors.